Design and of an Assistive Exoskeleton Robot for Rehabilitation for Post-stroke Recovery
Dr. Subodha Gunawardena, Ms. Tharinda Rajapaksa and Ms. Upeksha Chathurani
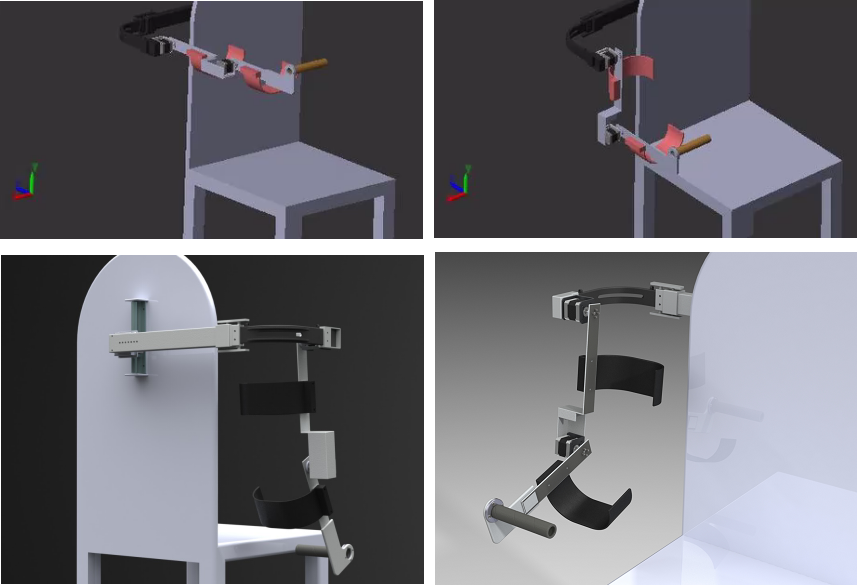
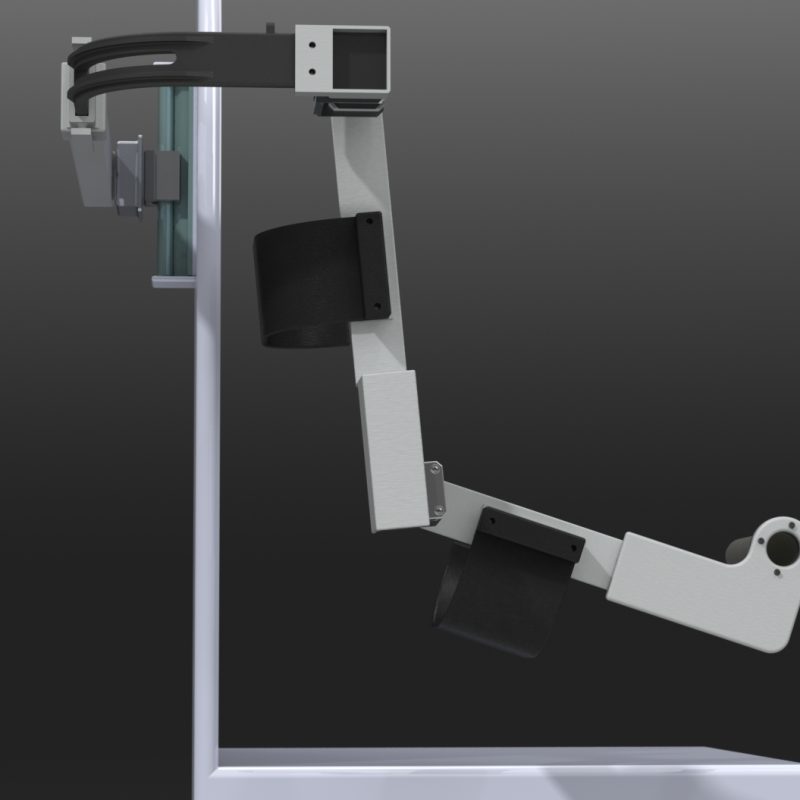
Patients with disabilities in the upper extremity are recommended to undergo therapy to regain motor skills. This work is focused on design and simulation of an assistive exoskeleton rehabilitation robot for the upper extremity of the human body.
Key Words: Rehabilitation Robots, Robot-Mediated Therapy, Upper limb Exoskeletons, Assistive Exoskeletons
Overview
Physical therapy is an essential treatment method for long or short term physical impairments including series of repetitive exercises over a long period of time to improve the impaired function (or condition).
Many people who suffered from a heart stroke are left with problems with one of their arms. Proper arm care after a stroke can help treat these problems. Strokes often cause paralysis (hemiplegia or hemiparalysis) or weakness of one or more of the muscles in your arm or shoulder. The muscles might feel tight instead of weak (spasticity). Recovering of motor function post stroke using movement therapy helps improving movement coordination. Arm therapy also serves to learn new motion strategies which is also known as “trick movements”, to cope with activities of daily living (ADL). Movement therapy serves also to prevent secondary complications such as muscle atrophy, osteoporosis, and spasticity. According to suggestions made by physical therapists, positioning of the arm is an essential part for recovery from a stroke. Physical therapists may suggest therapy exercises that help regain strength and flexibility in affected muscles. This might include muscle stretches, strengthening exercises, and range-of-motion exercises that are done with the assistance of the doctor and rehabilitation robots. The arm itself is considered to be complex analysis for instance position of the center of rotation of the shoulder complex as the changes with the upper-arm motions.
Further, Arthritis usually considered as chronic disorder which means it is a long developing condition and it is hardly curable or slowly progressive to the treatments. There are more than a hundred types of Arthritis and it is commonly in three major forms, namely, osteoarthritis (OA), rheumatoid arthritis (RA) and Fibromyalgia.
Treatment for Rheumatic arthritis includes medication, physical therapy, and surgeries. Medication is mainly used for first three treatments and physical/occupational (rehabilitation) therapy and surgeries are used in last two treatment methods. Medication is almost unavoidable and surgeries may not be required in most cases. However, they are always carried out by medical officers/surgeons which is hard to be replaced. Rehabilitation treatments focuses on exercise, heat/ice treatments, and massage. Further, they may also contain transcutaneous electrical nerve stimulation, acupuncture, patient/family education, stress management including emotional support and nutrition counselling.
Traditional rehabilitation involves standard exercises carried out in a hospital, training centers or home with intervention of a therapist highly skilled therapist which is costly task due to higher demand. Manually assisted movement training has several major limitations. The training is labor-intensive, and, therefore, training duration is usually limited by personnel shortage and fatigue of the therapist, not by that of the patient. The disadvantageous consequence is that the training sessions are shorter than that are required to gain an optimal therapeutic outcome. Finally, manually-assisted movement training lacks repeatability and objective measures of patient performance and progress. When the therapy is robot assisted, the duration and the number of training sessions can be increased, while reducing the number of therapists required per patient which indicates that, personnel costs can be significantly reduced. Furthermore, the robot provides quantitative measures (using sensors), thus, allowing the observation and evaluation of the rehabilitation progress. Developing a rehabilitation robot has been a challenging task because of the challenges imposed by human anatomy.
Project Contacts: Dr. Subodha Gunawardena, subodha@ruh.eie.ac.lk