RehaBot: Design and Development of Upper-limb Exoskeleton Robot for Stroke Recovery
P.V.N.U. Madhumali, N.M.P.M. Nishshanka, H.M.C.M.B. Herath, S.Gunawardhana
This project features the first phase of designing and developing an Exoskeleton Rehabilitation Robot with 2-DoF (degrees of freedom) for upper limb rehabilitation. The robot is targeted to work in Active, Passive, and Passive-mirrored modes with the ability to store patient data for ease of patient management.
Keywords: Rehabilitation Robots, Exoskeletons, passive mode, passive-mirrored mode

Overview
Robot assisted rehabilitation are getting popular due to their ability to provide therapies with repetitive movements resulting higher accurately and minimal intervention of a trained therapist. Further, reproduction of such a robot is much faster and consistent than producing a number of trained therapists. Design and development of rehabilitation robots are extensively studied in the recent past and RehaBot is one such exoskeleton device developed by us.
It features a robot arm with 2-DoF (degrees of freedom) with the capability of reproducing movements recorded by a therapist using a specific application software developed for the robot and live movements carried out by a therapist using a simple wearable device. That is, passive and passive-mirrored modes of operation, respectively. These two modes can best assist the patients with their movements without receiving any assistance from the them and are best suited for patients with full disability.
Features:
- 2-DoF (movements of shoulder joint and the elbow joint)
- Passive mode and passive-mirrored modes of operation
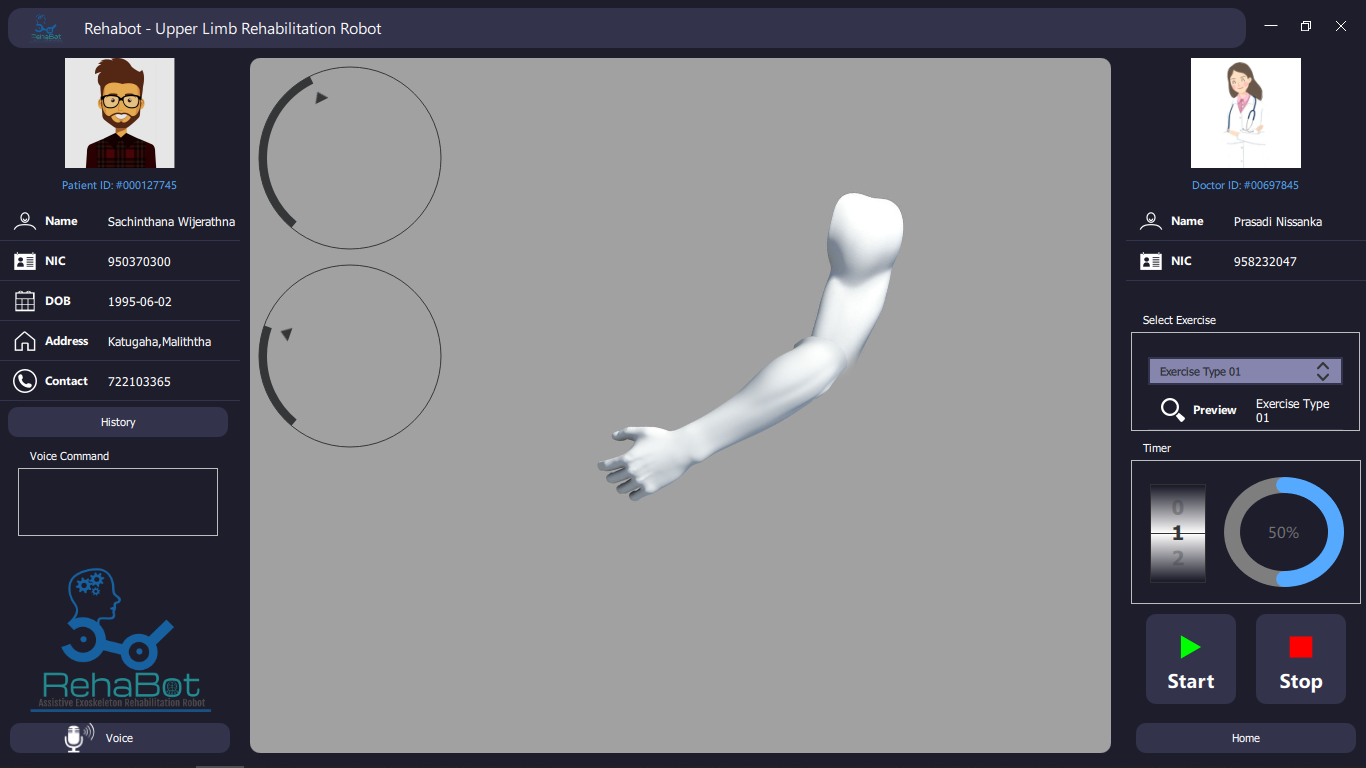
- Specialised application software for the operation
- Separate profile for each user to record their exercises
- Voice assisted navigation through for the software
Future works:
Patients with partial disability or those recovering from permanent disability may have a limited ability to move their limbs. The robot should assist the patients movements by identifying the movement direction and the required level of assistance which is called the Assistive mode of operation of the robot. Such research works are typically carried out using surface electromyographic (sEMG) signals and machine learning algorithms. As the next step, we will be implementing the assistive mode of operation for RehaBot.
Project Contacts: Dr. Subodha Gunawardena (subodha@eie.ruh.ac.lk)
Publications
- H.M.C.M.B.Herath, N.M.P.M.Nishshanka, P.V.N.U. Madhumali, and Subhodha Gunawardena, “Voice Control System for Upper Limb Rehabilitation Robots Using Machine Learning”, accepted to publish in proc. of IEEE World Forum on Internet of Things 2021, June 14th to July 31st, 2021.