Autonomous Transmissions Line Inspection and Fault Detection System
Mr. Pasika Ranaweera, A. M. G. V. I. Lakmal, K. S. S. Prabhashwara, D. C. Alahakoon, W. M. M. S. C Perera, U. L. J. T. Perera, T. U. Malaviarachchi
Power transmission network is the most critical part of a power system due to its connectivity with generation and distribution stations. Though it is a riskier employment to carry out the routine inspections of the transmission lines manually, the task of inspection is imperative to the continuous operation of the power system. However, the new trend of transmission line inspection is based on extracted details of the lines by means of Remotely Operated Vehicles (ROVs) traversing through them. This project proposes a method being tested by a prototype for traversing alone the transmission conductor, inspecting the line through real time video streaming, detecting faults and pinpointing them through Geo Tagging. Automated transmission line inspection and fault detection is proposed to carry out through image processing and sensory data acquisition. Radio Frequency (RF) technology is the main communication mechanism between the operator and the ROV. This technology will expand the remotely operating distance of the ROV. Furthermore, a mechanism was developed to enable the robot to cross over from one span to another in the transmission network which include suspension type insulators.
Key Words:
Electric shielding, Fault detection, Image processing, Live video streaming, LYNX conductor, Magnetic shielding, RF, ROV, Suspension insulator, HV Transmission Line

Overview
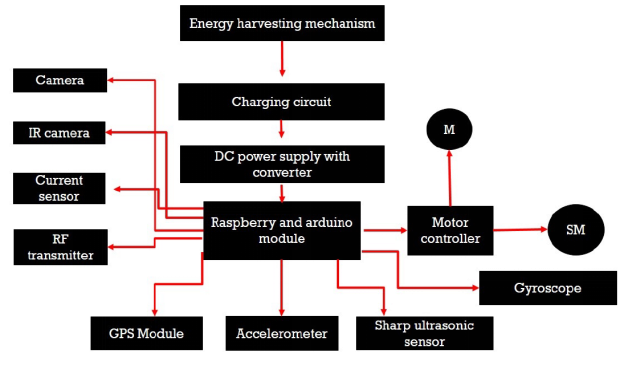
The conceptual diagram of the proposed system (referred as ALTIRA) is shown in the figure above.
Processor
Processor is the most important part of this robot, where Raspberry pi and arduino modules are employed for this purpose. Motor controlling and arm movements are performed using arduino and all other controlling is done by the raspberry pi module. Processing speed of the raspberry pi module is higher than the processing speed of the arduino since all calculations and data analysis are carried out in the raspberry pi module.
Motor controller
Motor controller is the main controlling device which is used to control the forward and backward movements of the robot. ALTIRA consists three Direct Current (DC) motors which are embedded with each arm. So controlling of speeds of those motors is very much important to maintain the smooth movement of the robot speed with synchronized horizontal motion.
Input devices
Inputs for the robot circuit can be categorize as data inputs and power inputs. Transmission line inspection need wide range of data regarding the transmission line, so various kind of data input devices are used to achieve those requirements.
Power inputs devices
To cater the power requirement of the robot is supplied using battery and alternative power sources. There are various power requirements for the robot.12V 6800mAh lipo battery is used as the main power source.5V and 12V are the main voltage requirements of the robot, using buck converters desired voltage levels are obtained. Alternative power sources such as solar power and power harvested from transmission line is fed to the battery through a charging circuit to enhance the battery life time.
Data input devices
Determination of transmission line condition is achieved using several sensors. IR camera, accelerometer, sharp ultrasonic sensor, magnetic flux sensor, GPS module, RF receiver and gyroscope are the main sensors used for the ALTIRA.
- Accelerometer and gyroscope; Measurements taken from these sensors are important to maintain the robots stable movements.
- IR camera; IR camera is the main data input device to the robot, to determine the mechanical faults of the transmission line, high quality video feed is needed to be taken. So to achieve that requirement 5MPIR camera is used. Using that camera, a live video feed is transmitted to the controller of the robot.
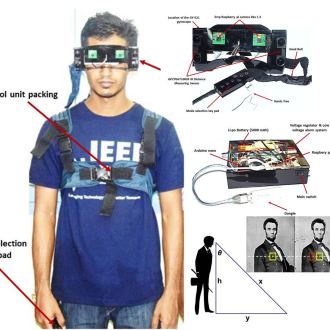
- Sharp ultrasonic sensor; Ground clearance of high voltage transmission lines is a critical parameter. A ground clearance measurement of lesser than the minimal accepted value could cause an arc between the line and the ground. So to determine the ground clearance of the line, sharp ultra-sonic sensor is used.
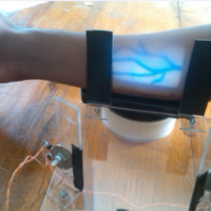
- Magnetic flux sensor; Magnetic flux sensor is used to measure the current flowing in the transmission line. Using transmission line current; electrical faults can be determined. During an electrical fault of a sudden variation of the current value can be observed. Using magnetic flux sensor, current variation can be obtain using the magnetic flux variation around the transmission line.
- GPS module; GPS module is used to obtain the exact position of the robot. Fault locating is a big challenge for a transmission line inspection robot .So to determine the fault location a GPS module is used. Using a time Vs GPS location plot, exact fault location can be determined.
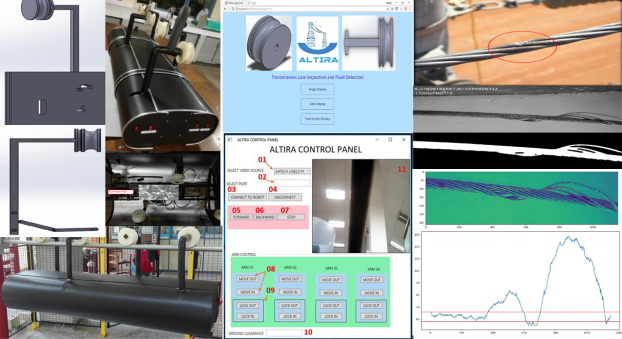
- RF receiver; ALTIRA is controlled via a Graphical User Interface (GUI) application which is running on a remote device, so a proper communication between controller and robot is needed. RF communication is used to cover the large coverage area. RF receiver is used to convey the control signals to the robot which is given by the control application.
Output Devices
The output circuit of the robot mainly includes with a RF video transmitter and 4G high speed router which is connected wireless to the raspberry pi. RF video transmitter is used for transmit the real time video feed to the controller and a 4G Router is used to access the Internet to upload the analyzed data to the web application of the robot.
Summary
The proposed approach is an adaptable and economical solution for high voltage transmission line inspection task. A ROV can reach all the corners of the transmission conductor and provide accurate fault detection results. All the appliances used in the ROV are available in the local market and the technologies and software being used are not rare. Also the electrical and magnetic shielding of the prototype have been tested under laboratory conditions to seek the withstand-ability of the ROV shielding. The tests have proven successful to be deployed in actual transmission line. Moreover, the proposed image processing based fault detection method has immense potential for automating the entire transmission line maintenance process. However, the operating time of the prototype ROV is considerably low due to its high energy consumption. An energy harvesting method could be used to conserve the energy and improve the operating time while it reduces the weight accounted for the battery.
Updates
Phase #2
Publications
- Perera, W. M. M. S. C., U. L. J. T. Perera, T. U. Malaviarachchi, and P. S. Ranaweera. “Developing a Power Generation Technique for High Voltage Environments through Electromagnetic Energy Harvesting.” In Third Annual Research Symposium (ARS 2016) of Faculty of Engineering, University of Ruhuna, Sri Lanka, E/14, vol. 14. 2016.
- Ranaweera, Pasika, Thamashi Malaviarachchi, Thadeesha Perera, and Supun Perera. “Self-Sustaining Autonomous System for High Voltage Transmission Line Inspection and Fault Detection in Sri Lanka.” First IEEE International Conference on Micro & Nano Technologies, Modelling & Simulation, MNTMSIM 2016, Kuala Lumpur, Malaysia, March 2016.
- Malaviarachchi, Thamashi, Thadeesha Perera, Supun Perera, and Pasika Ranaweera. “Autonomous Approach for High Voltage Transmission Line Inspection and Fault Detection.” International Journal of Simulation–Systems, Science & Technology17, no. 26 (2016).
- Ranaweera, P. S., D. C. Alahakoon, K. S. S. Prabhashwara, and A. M. G. V. I. Lakmal. “Autonomous Transmission Line Inspection and Fault Detection System.” In 2018 Moratuwa Engineering Research Conference (MERCon), pp. 402-407. IEEE, 2018.