FPGA Implementation of High-Speed MIMO Wireless Video Transmission for real-time 360 Panoramic Video Applications – Phase I
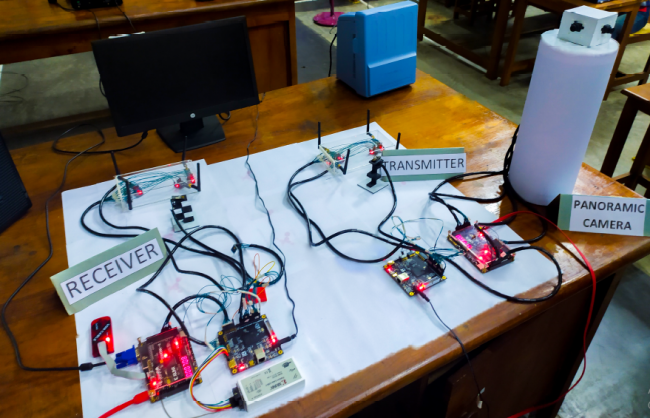
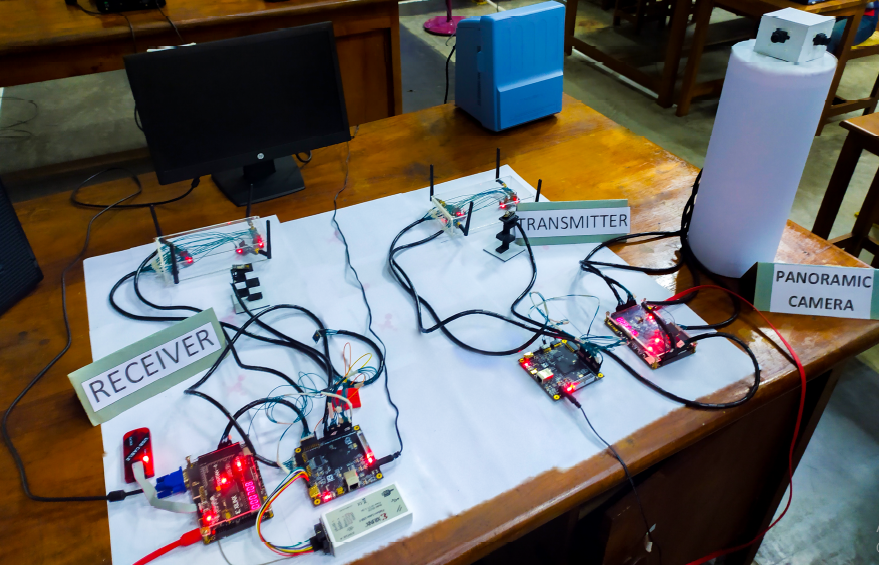
FPGA implementation of high-speed MIMO wireless video transmission for real-time 360 Panoramic Video Applications – Phase I P.A.D.S.N. Wijesekara, P.K.D. Chinthaka, A.M.S.D. Wickramasinghe, , W.A.P.M. Weeraarachchi The work that has been done in is the development of a hardware implemented system using Field Programmable Gate Arrays (FPGA) for real-time wireless transmission of a panoramic video…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}