Project Abstract
This project presents the development of a Vertical Take-Off and Landing (VTOL) fixed-wing Unmanned Aerial Vehicle (UAV) that combines the operational flexibility of multirotor drones with the efficiency and endurance of fixed-wing aircraft. Conventional fixed-wing UAVs require long runways for take-off, while multirotors suffer from limited range due to high energy consumption. The proposed UAV overcomes these limitations by employing a front-mounted propeller for vertical lift, followed by a seamless transition to horizontal flight using conventional control surfaces. An onboard flight computer with integrated sensors ensures stability during take-off and transition phases. By avoiding complex tilt-rotor mechanisms, the design remains lightweight, cost-effective, and reliable. The UAV successfully completed take-off and transition trials, demonstrating strong potential for applications in surveillance, reconnaissance, and environmental monitoring.
Overview
Conventional UAVs present a trade-off between range and operational flexibility. Fixed-wing UAVs are efficient for long-distance missions but require runways, restricting use in space-limited environments such as urban areas or remote terrains. Conversely, multirotor drones offer vertical take-off capability but are limited by short flight times and reduced endurance. Existing VTOL hybrid designs attempt to merge both advantages but rely on complex tilt-rotor systems or additional lift mechanisms, increasing weight, cost, and maintenance requirements.
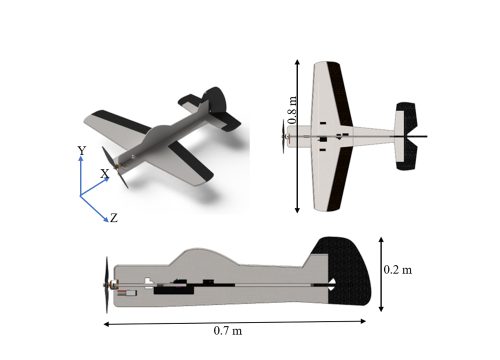
The significance of this project lies in addressing these limitations through a simplified VTOL fixed-wing UAV design that uses only a front-mounted propeller and conventional aerodynamic surfaces for both vertical take-off and horizontal flight. By avoiding mechanical complexity, the UAV is lighter, more reliable, and cost-efficient while retaining the benefits of extended range and endurance.
Such a UAV is highly relevant for modern applications requiring compact operations with long endurance, including border surveillance, reconnaissance, disaster response, environmental monitoring, and small-scale logistics. Its ability to operate from confined spaces while maintaining efficiency provides a unique solution not offered by traditional UAVs. Furthermore, autonomous stabilization through a sensor-integrated flight computer enhances safety and adaptability, making it suitable for real-world deployment.
This project successfully delivered a hybrid UAV that merges the maneuverability of multi-copters with the endurance of fixed-wing aircraft, offering vertical take-off and efficient long-range flight in a single platform. A major achievement of the design is its ability to operate without additional actuators or tilt mechanisms, relying entirely on conventional control surfaces and a front-mounted propeller. This simplifies the overall structure, reduces weight, and increases reliability compared to traditional VTOL systems.
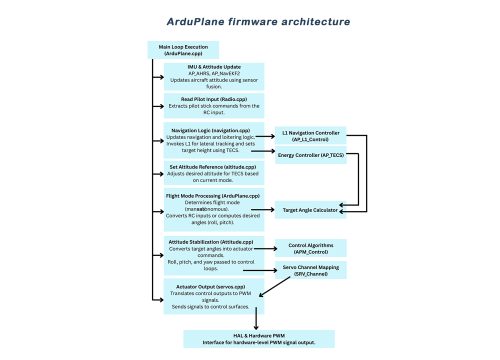
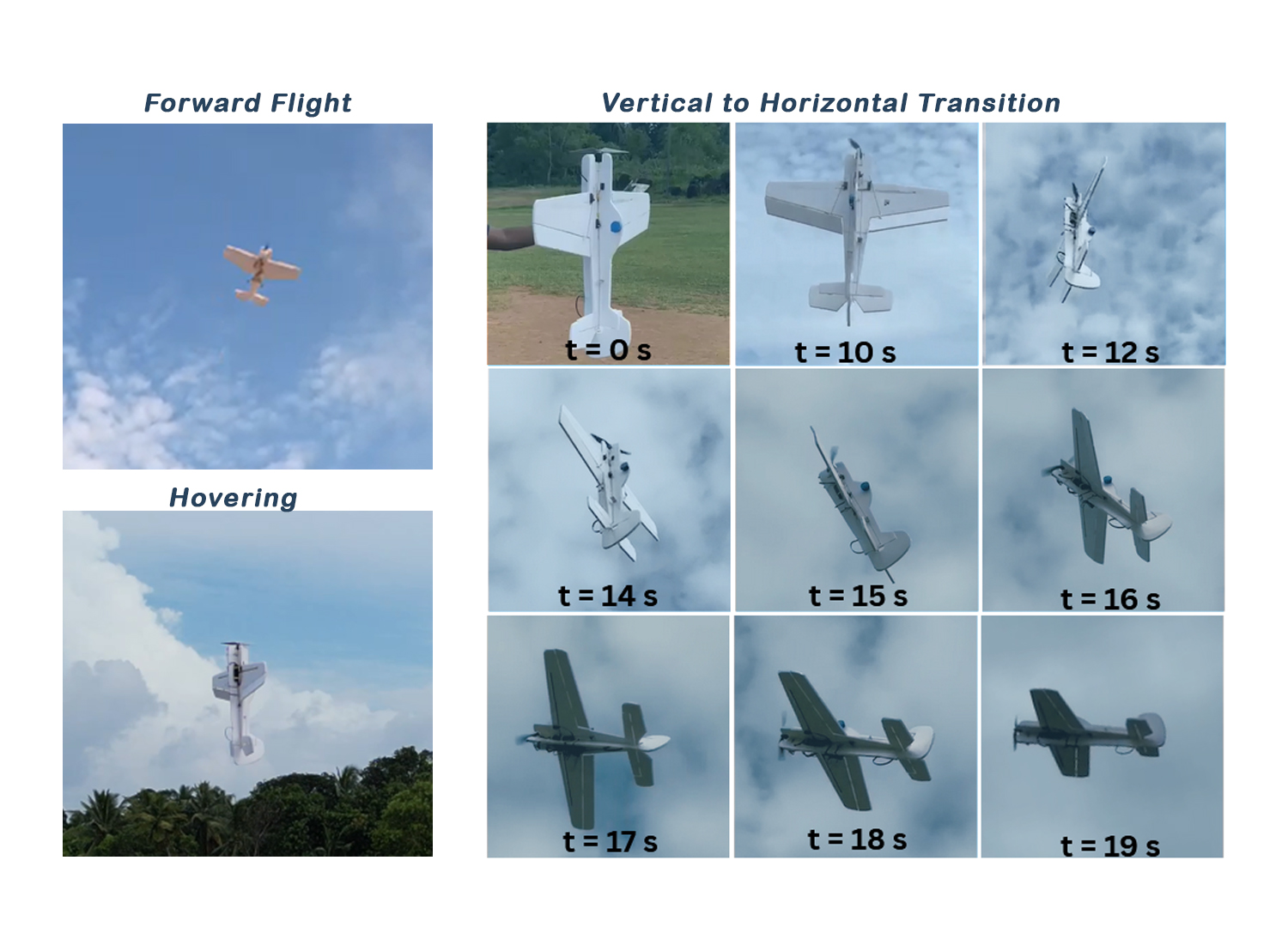
During testing, the UAV achieved stable vertical take-off with a thrust-to-weight ratio greater than one, where the control surfaces were actively managed by the onboard flight controller to stabilize pitch, yaw, and roll using prop wash. The transition to fixed-wing mode was accomplished smoothly by gradually pitching the aircraft to a predetermined angle, after which control seamlessly shifted from the vertical flight regime to conventional fixed-wing controllers. Once transitioned, the UAV performed like a standard fixed-wing aircraft, providing efficient and stable flight.
Another key feature of the system is its autonomous capability. All maneuvers—take-off, transition, and fixed-wing flight—are executed automatically by active control systems, requiring only higher-level pilot inputs such as mode selection and ascent or descent rates. This autonomy reduces pilot workload and enhances operational safety.
Looking forward, the expected outcome of the project is the integration of vertical landing capability, completing the VTOL cycle. With its simplified design and versatility, this UAV is positioned as a practical and cost-effective solution for surveillance, reconnaissance, mapping, and lightweight cargo delivery in space-constrained environments.